2025年11月14日
配天机器人2025年11月14日
TE2025年11月14日
西门子2025年11月14日
新时达2025年11月14日
蔡司工业
2025年11月13日
埃尔森
2025年11月10日
BBS
2025年11月07日
劳易测
2025年11月06日
和利时
2025年11月14日
威图
2025年11月14日
TE
2025年11月14日
KUKA
2025年11月14日
先导智能
2025年11月14日
TDK
传统CAN由于采用事件触发机制,在最大允许总线负荷率、实时性和解决多控制器总线冲突方面略显不足。CAN是由德国BOSCH开发的基于差分信号的总线架构串行通讯网络。相比于其他车用网络如LIN、K线、FlexRay、MOST而言,CAN因其成本相对较低、数据交换能力相对较强、可靠性高等特点而得到工业界和研究单位的广泛应用。BOSCH公司推出的TTCAN协议,采用时间触发机制与事件触发机制相结合的方式,基本解决了上述问题。2004年国际标准委员会正式推出了TTCAN协议---ISO11898—4。
TTCAN采用时分多路(TDMA)的方式,将通讯划分为多个循环,每个循环的通讯时间被划分为两个部分:基于静态时间分配的时间触发部分和事件触发机制。在时间触发部分,时间被划分为互不交叉的时间段,称为时间窗,每一个时间窗内只允许出现一个信号,如果在某个时间窗内对应的信号没有出现,则此信号不会在属于其他信号的时间窗内出现。在事件触发部分,各个信号按照传统CAN协议的按位仲裁机制进行总线仲裁,由优先级高的信号获得对总线的控制,优先级低的信号则延迟发送。
燃料电池城市客车采用分布式控制系统,除了整车控制器之外,还有燃料电池发动机、直流变压器、电动机、氢管理系统等多个子控制器,各控制器之间主要通过CAN网络进行数据交换。随着研究的深入,对于总线上数据的需求和总线本身的可靠性要求也相应提高,原有的协议也无法继续满足控制精度和数据吞吐量的需求,因此作者设计了新的TTCAN协议,通过定义时间窗来限制每个信号的发送起始与截止时间,实现了燃料电池汽车动力系统控制器网络的有序通讯,满足了燃料电池客车的控制和数据采集需求。
为了缩短控制器的开发周期,作者采用以MPC561 32位单片机为核心,自主开发的通用控制器平台,搭建了燃料电池整车网络仿真环境,并且采用NI公司的CAN pcmcia/2采集卡和LabVIEW开发环境,开发了TTCAN测试平台,实现了TTCAN信号的在线检测。
2.1 燃料电池客车控制系统网络架构
由于燃料电池客车涉及多个子系统,各个子系统内部控制逻辑复杂,为了实现各个子系统的模块化解耦开发和独立调试,燃料电池客车控制系统了采用分布式架构,各个部件之间主要通过总线进行通讯。综合考虑到通讯的稳定性、传输速度等因素之后,采用了传统客车上常用的CAN网络。
燃料电池客车各部件与整车控制器形成的三级CAN网络结构如下:第一级为整车CAN网络,包括VCU(整车控制器),MCU(电机控制器),BMS(蓄电池管理系统),FCS(燃料电池控制器),HPS(氢管理系统)等;第二级为燃料电池系统CAN网络和蓄电池管理系统单片检测网络;第三级为燃料电池系统单片检测网络。各一级节点的主要功能见表1。节点的首地址采用了SAE J1939协议中为未来公路设备保留的地址区域128~167。
表1 一级节点的主要功能一览
节点名称
节点代号
功能
首地址
优先级
整车
控制器
VCU
完成整车动力系统控制功能和混合动力控制
协调各控制器
167
3
电机
控制器
MCU
完成对电机的控制和检测
163
6
蓄电池
管理系统
BMS
实现对蓄电池的检测
162
6
燃料电池控制器
FCS
实现对燃料电池的控制和检测
165
6
氢管理
系统
HPS
实现对氢系统的控制和检测
166
6
DC/DC
变换器
DCC
实现对DC/DC变换器的控制和检测
164
6
燃料电池整车的三级网络架构如图1所示,本文涉及第一级整车CAN网络。
图1 燃料电池客车整车网络
2.2 通讯时序
在TTCAN协议中,采用静态表的形式对时间进行了划分。若干个时间窗构成一个基本周期,每个基本周期以参考消息开始;若干个基本周期构成矩阵周期,矩阵周期是保证所有信号至少重复出现一次的最小周期。此外,在协议的具体实现上,可以选择level 1 或是 level 2[5],前者占用了参考消息中的1个字节,后者占用了参考消息的4个字节,但可以实现更精确的定时。本文中采用了level 1的设计。
在燃料电池城市客车的TTCAN协议中,基本周期为10ms,矩阵周期由16个基本周期构成,为160ms。这样就可以根据不同的出现频率,将信号的传送周期配置为10~160ms。考虑到客车中的传感器特性各不相同,有些能够在毫秒级别内对物理量变化作出反应,如电流传感器、电阻式传感器等,另一些则需要一定的时间才能形成有效的测量结果,如湿度传感器、流量传感器等,所以将信号按时间常数的大小进行分组对于提高信息效率,节约总线资源是很有必要的。
在燃料电池客车TTCAN网络协议中,按照信号对于控制的重要性、对应传感器的时间常数、对于研究的重要性和出现的概率,将信号分为3类,分别对应于不同的传送周期。第一类为对控制有重要意义,且变化速度较快的信号,如燃料电池的电压、电流,电机的转速、转矩等等,此类信号在每个基本周期中均出现一次,占有独立的时间窗,称为关键信号,周期为10ms;第二类对控制和研究有一定意义,但是变化速度较慢,如温度等,此类信号在一个矩阵周期中出现4次,占有独立的时间窗,称为状态信号;第三类信号为基本不变或是在故障情况下才会发生变化的信号,如故障码等,此类信号在一个矩阵周期中出现2次,占有独立的时间窗,但也可以配置成通过仲裁竞争一个公用的时间窗,称为诊断信号,周期为80ms或不定周期。
燃料电池客车TTCAN的矩阵周期如图2所示,其中关键信号1~5每个周期相同,状态信号1、2和诊断信号1随周期序号变化而变化。
图2 燃料电池客车的TTCAN矩阵周期
表2为采用新通讯时序之后的燃料电池TTCAN网络与上一代燃料电池CAN网络的参数对比,从数据可以发现:新协议大大提高了燃料电池的总线负荷能力。
表2 新旧协议性能对比
通讯速率
信号总数
CAN桢数
总线负荷率
最小周期
新协议
250kbps
~70
21
52.5%
10ms
旧协议
250kbps
~60
14
15%
50ms
3 TTCAN测试平台
3.1 TTCAN故障现象简析
按照TTCAN的约定,独占时间窗内的每个信号只能在为其分配的时间窗内进行发送,如果在规定时间内信号没有发送,则信号不应再尝试发送,否则就有可能影响其它信号的正常发送,进而影响网络通讯的有序性。如果发现信号在分配之外的时间窗内出现,则应认为此信号可能出现故障,应在设计检验阶段予以消除。
当信号A在原属于信号B的时间窗内发送时,可能出现以下一种情况:
1、信号A发送请求先于信号B出现,并且在没有竞争的情况下通过仲裁,则信号A发送,信号B至少需要等待信号A发送完成并经过若干个脉冲时间,才能进行发送;
2、信号B发送请求先与信号A出现,并且在没有竞争的情况下通过仲裁,此时类似于情况1,信号B首先发送,信号A等待;
3、信号A、B的发送请求同时出现在总线上,此时进行按位仲裁,由优先级高的信号首先发送。
由于在燃料电池TTCAN网络中各子系统采用同一优先级,一旦出现总线按位仲裁,时间戳将增大,增加了信号时序的不确定性。所谓时间戳,是指CAN控制器中记录信号发送接受时间的一个寄存器内的数值,用于记录信号的发送与接受时刻。同时,通过仲裁失利信号有可能比未仲裁信号需要更多时间这个特点,可以从CAN信号时间戳数据中分析得到仲裁的出现情况。
图3为典型的发送故障与未发生故障的信号时间戳对比,所有时间戳均基于参考消息。
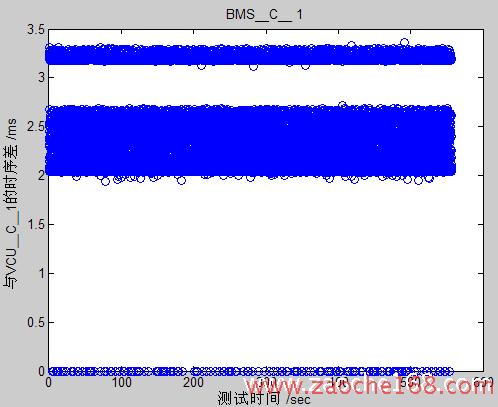
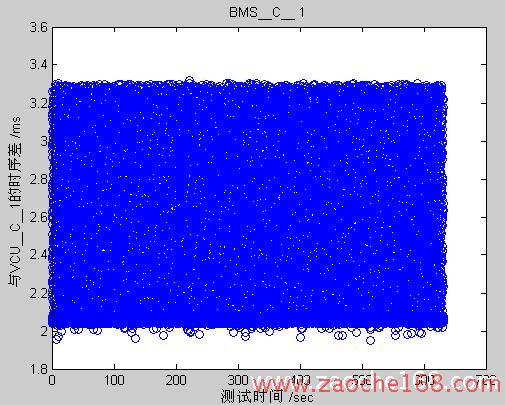
图3 发送故障与未发生故障的信号时间戳对比
从图中可以看到,正常的时间戳由于控制器及算法的特性,存在于一个带状范围内。发生故障的时间戳范围出现断层,这是由于其它信号在断层时间内插入,并且通过仲裁获得了优先发送权,导致发送的时间(128bit / 250kbps ~= 0.512ms)内,原有CAN信号无法发送的缘故。
3.2 TTCAN测试平台的开发
为了实现TTCAN的在线检测,采用美国国家仪器公司的LabVIEW编程环境和Freescale公司的MPC561单片机,开发了燃料电池客车TTCAN测试平台。其中下位机由以PCA82C250等芯片实现三路CAN通讯功能的单片机控制器构成,能够实现对燃料电池TTCAN网络部分或全部信号的模拟;上位机由工控机以及CAN采集卡等构成,能够实现对下位机的在线配置,以及对TTCAN网络信号的采集、显示、在线分析、存储等功能。
测试程序界面见图4,CAN采集的流程见图5。

图4 燃料电池TTCAN测试平台界面
图5 CAN采集流程
4 TTCAN协议的测试
4.1 测试条件
在实际开发过程中,采用TTCAN测试平台,分别对燃料电池客车的各个部件进行了独立测试和整车网络模拟测试。在独立测试中,测试平台仅发出参考信号,以获得被测控制器的原始发送时序;在整车网络模拟测试中,测试平台不仅发出参考信号,也同时发出除被测控制器外其他控制器的所有信号,以此测试被测控制器CAN信号发送误差对于其他控制器的影响情况。
4.2 测试结果与分析
以某公司提供的电池管理系统BMS为例,测试结果如图6、图7所示:
图6 独立测试结果
图7 网络模拟测试结果
测试结果说明,被测CAN信号能够在规定的独占时间窗内完成发送,且不存在漏桢的情况(漏桢情况通过比较参考桢与被测桢数量得出)。此外,数据格式也与协议相符合,故测试结果为通过。
5 结论
本文介绍了燃料电池城市客车的TTCAN协议制订与测试过程。TTCAN是基于CAN协议的上层协议,其时间触发的特性能够避免部件之间的总线冲突,增大允许的总线负荷率,非常适合混合动力汽车和其他采用分布式控制的工业系统。在TTCAN协议的制订过程中,作者将信号按重要程度分为10ms,40ms,80ms三种周期,从而大大提高了效率。针对测试而开发的软硬件平台很好地完成了网络信号的测试工作。测试结果证明,TTCAN能够在不改变控制器硬件的情况下显著提高整车通讯的可靠性与信号容量,对于提高整车网络通讯性能有很重要的意义。




























































官方微信号

官方视频号
