2025年11月14日
配天机器人2025年11月14日
TE2025年11月14日
西门子2025年11月14日
新时达2025年11月14日
蔡司工业
2025年11月13日
埃尔森
2025年11月10日
BBS
2025年11月07日
劳易测
2025年11月06日
和利时
2025年11月14日
威图
2025年11月14日
TE
2025年11月14日
KUKA
2025年11月14日
先导智能
2025年11月14日
TDK
一、前言
再生制动是一种降低电动汽车能耗、提高续驶里程的重要技术手段。电动汽车最重要的特点就是能够实现再生制动,即汽车制动时,可以通过控制电动系统的电机工作为发电机模式,将汽车的动能和势能转换为电能储存到储能元件中,然后对其进行再利用。
在一般情况下仅由电机为汽车提供制动力是远远不够的,并且电机制动力还受电机运行速度和电池电荷状态等多方面因素影响,因此它还必须具有机械制动系统同时工作,以满足电动汽车的制动强度要求和制动效能的稳定性。
在设计电动汽车制动系统控制策略时,需要解决好的两个问题是:怎样在再生制动和机械摩擦制动间分配制动力来尽可能地回收制动能量;怎样在前、后轮上分配制动力来使汽车有一个好的制动稳定性。解决好这两个问题是设计电动汽车制动系统的关键。
一、电动汽车的前后轮制动力和制动能量分配情况
要设计电动汽车制动系统的控制策略,首先要了解在一些典型循环工况下汽车前、后轮上的制动力及制动能量的分配情况,然后再以此为依据,制订合理的制动控制策略。
首先假定前后轮的制动力按I曲线规律分配,忽略行驶阻力,则汽车前、后轮的制动力分别为:

其中Mv——汽车质量,kg
j——汽车减速度,m/s2
L——汽车轴距,m
La——汽车重心到前轴的水平距离,m
Lb——汽车重心到后轴的水平距离,m
hg——汽车重心高度,m
图1和图2所示为某汽车在FTP75城市循环工况下,前、后轮上的制动力和制动能量分配情况。从这些图可以看出:(1)前驱动轮消耗了总制动能量的65%左右,因此如果是单轴再生制动,则再生制动用于前轮较为恰当;(2)在车速小于40km/h的范围内,制动力基本保持恒定不变,大于40km/h则有所下降,该特性与电动机的低速恒扭矩、高速恒功率的特性比较吻合;(3)图2说明了在10~50km/h的车速范围内制动能量占全过程制动能量的大部。


二、电动汽车制动系统的控制策略
根据以上对汽车在典型循环工况下制动力和制动能量的分配分析,再结合电动汽车制动系统的特性,可制订3种基本的制动控制策略:最优制动感的串行制动;最优制动能量回收的串行制动;并行制动。最优制动感的串行制动控制策略的目的是使制动距离最小,并且驾驶员能获得最好的制动感。最优制动能量回收的串行制动原则是,在满足总制动力要求下,尽可能多地回收制动能量。这两种制动策略都是首先考虑了再生制动,再考虑机械制动,所以都称作串行制动。由于串行制动要对电动系统和机械摩擦制动系统同时控制且有较大的难度,在目前电动汽车上的应用还在进一步研究之中。
并行制动控制策略同样具有再生制动和机械制动,而且它们同时存在并起作用,再生制动仅用于汽车前轴。该策略参见图3。

并行制动系统像传统的机械制动系统一样,在前后轴上的制动力是按固定比值分配的。再生制动为前轴提供附加的制动力来满足总的制动力分配。前后轴上的机械制动力都是与制动系主缸压力成正比的。电机提供的再生制动力是主缸压力的函数,因此也就是汽车制动减速度的函数。再生制动力也和电机转速相关联,而在电机低转速时汽车的动能几乎不能被回收,所以为保持在高制动强度(如图3所示的z=0.9)下的制动平衡,再生制动系统此时不提供制动力。当制动强度小于该值时,再生制动系统又重新工作。制动强度若是小于某一特定值,如图3中的0.15,则机械制动系统不工作,车轴上仅有再生制动力,这类似于传统ICE汽车的发动机反拖制动。
并行制动系统中的机械制动系统无须电子控制。通过压力传感器获取主缸压力(代表制动强度)信息并将其整理后传输给电机控制器,电机控制器再控制电机产生适当的制动扭矩供给车轴来达到再生制动的目的。与上述两种串行制动系统相比,并行制动系统的结构和控制都比较简单,但相比之下制动感和制动能量的回收也逊色一些。
三、电动汽车制动系统仿真
下面针对一混合动力汽车的例子,使用ADVISOR软件,并添加自己所建的控制策略,对其进行混合动力汽车的油耗及动力学性能分析。图4所示为本实例车预置的在不同工况下总制动力、再生制动力及前后轴机械制动力的并行控制策略。得出的油耗结果再跟无再生制动(制动和常规汽车一样仅采用机械摩擦方式)混合动力汽车的仿真结果作比较。

如图5为该实例汽车仿真计算所选用试验循环工况,以及仿真得出的再生制动、前轮机械制动和后轮机械制动的制动力结果比较。

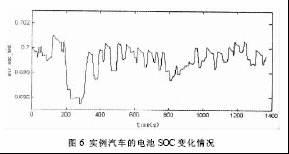
仿真结果表明,该实例混合动力汽车采用并行制动控制策略,在典型的FTP75城市循环工况下能维持电池荷电状态(SOC)的平衡(如图6),并能回收制动能量的55%左右。采用简单的并行制动控制策略在目前来说用在纯电动汽车和混合动力汽车等电动汽车上是比较理想的。
四、结论
本文介绍了电动汽车制动系统的3种基本控制策略,着重分析了在目前较容易实现的并行制动控制策略,并对实例汽车进行了制动系统的仿真分析。在典型的FTP75城市循环工况下,该制动系统能回收汽车的制动能量的一半以上。在设计控制策略时结合了FTP75城市循环工况的频繁制动和制动强度低的特点,考虑到了制动能量回收和制动稳定性两方面因素,制订了如图4所示的控制策略,通过仿真分析可知该策略能满足制动稳定性的要求,并能回收制动能量,降低油耗,延长续驶里程,采用本文所述并行制动系统,可使油耗降低10%以上。




























































官方微信号

官方视频号
